点云处理基础
Reference
-
《深蓝学院三维点云处理课程》
-
open3d docs
点云简介
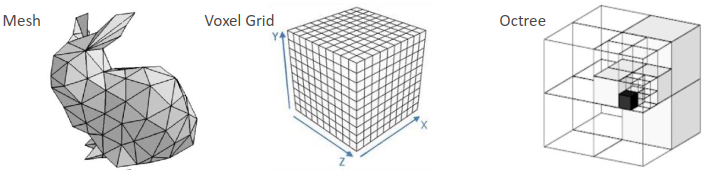
一些三维的表达形式:
-
mesh:多用于计算机图形学;
-
voxel grid:排列整齐、有序,可以对标二维的像素,但是空间大部分位置是空的,造成浪费;
-
八叉树: 只向下细分内部有东西的格子,空间紧凑了,但是结构复杂,可能的计算开销相对变大。
点云:一种简单且紧凑的数据格式。
点云处理的困难:
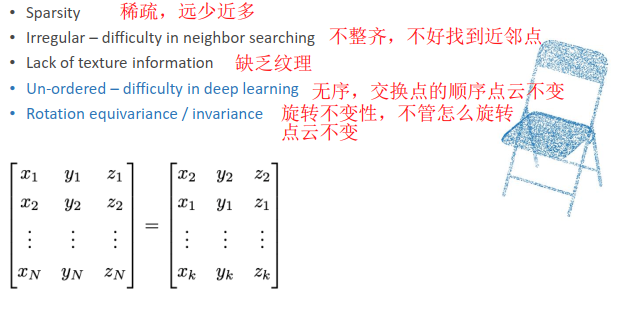
其中,无序和旋转不变性是深度学习方法需要想办法处理的,因为变换顺序或者旋转后输入网络的矩阵的数值就完全变了,但点云还是点云。
POINT NET就是在矩阵中的数据维度上做max pool,不管顺序怎么变,max pool的值都是相同的,解决了无序的问题。
旋转不变性依然是一个比较大的问题。
数学工具与基础算法
pca-主成分分析
b站链接:https://www.bilibili.com/video/BV1E5411E71z?from=search&seid=12219938521484233618
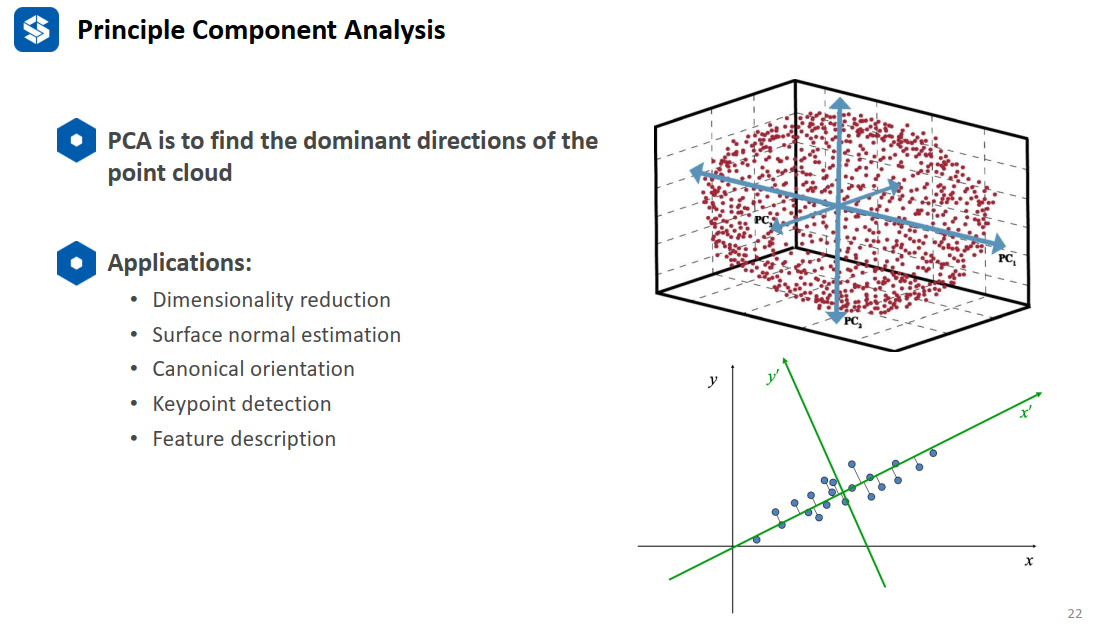
PCA主要用于数据降维与表面法向量估计等。
数据降维的目的用更少的空间保留尽可能多的信息。主成分就是所有数据投影到这个方向时,能够保留最大的信息(即方差最大)。假想下图中的二维点如果投影到某个方向时变成了一个点,那么就没有保留到原始的分布信息,所以要求方差最大,就是想把差异最大化,从而保留原始数据的分布特点。
求解主成分
协方差矩阵的推到,过程不用记:
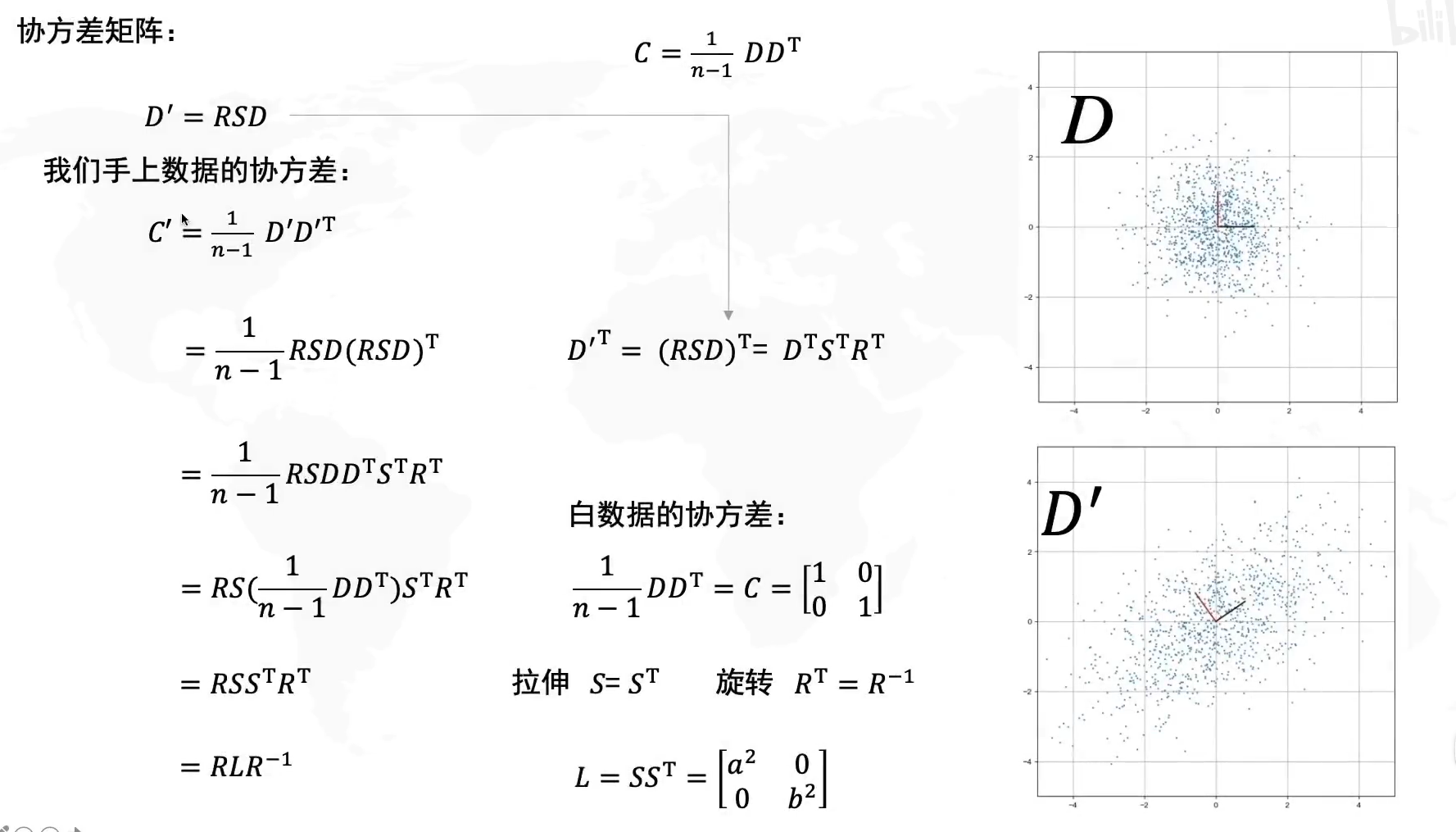
主成分为旋转矩阵R的列向量。
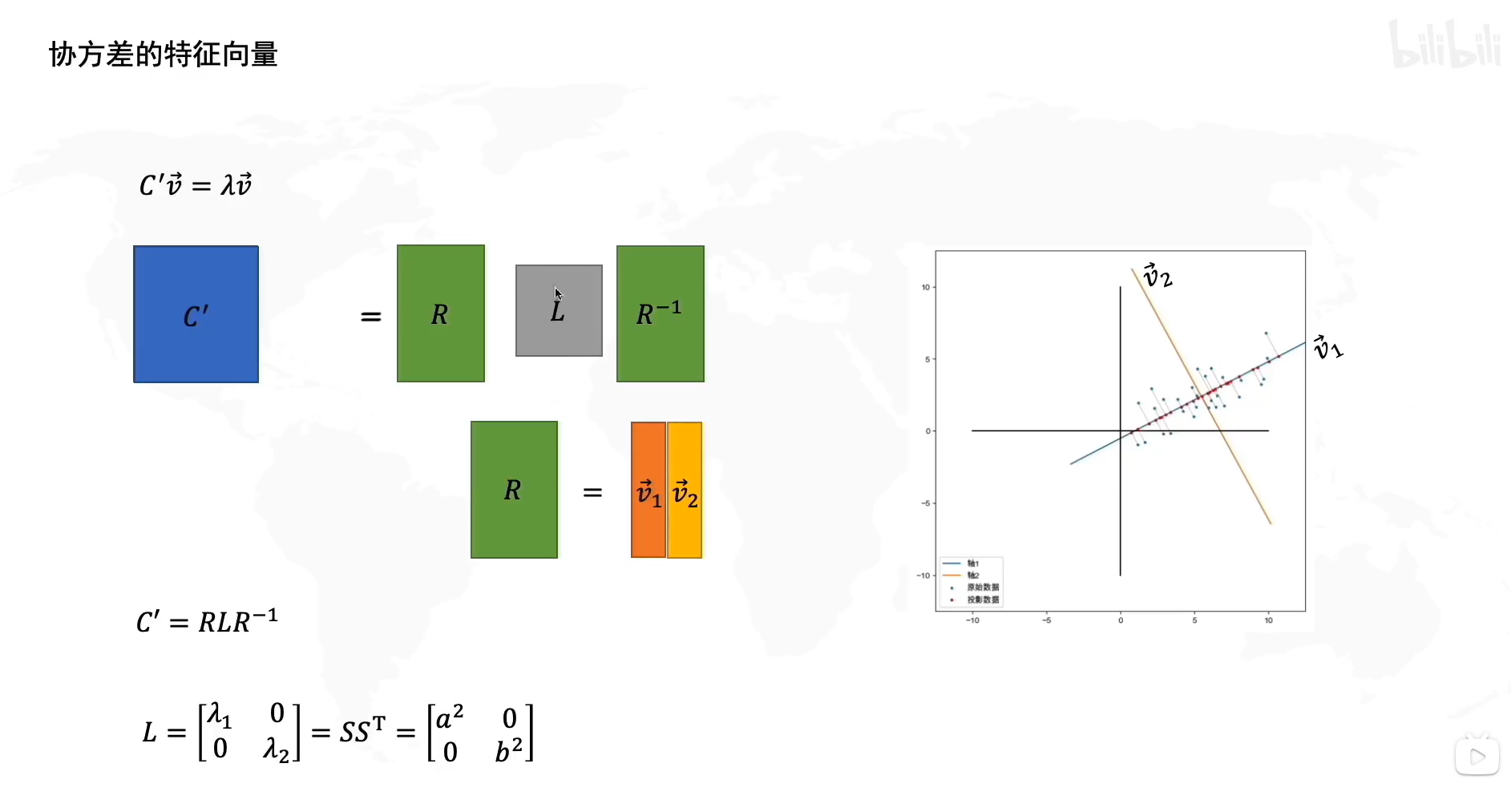
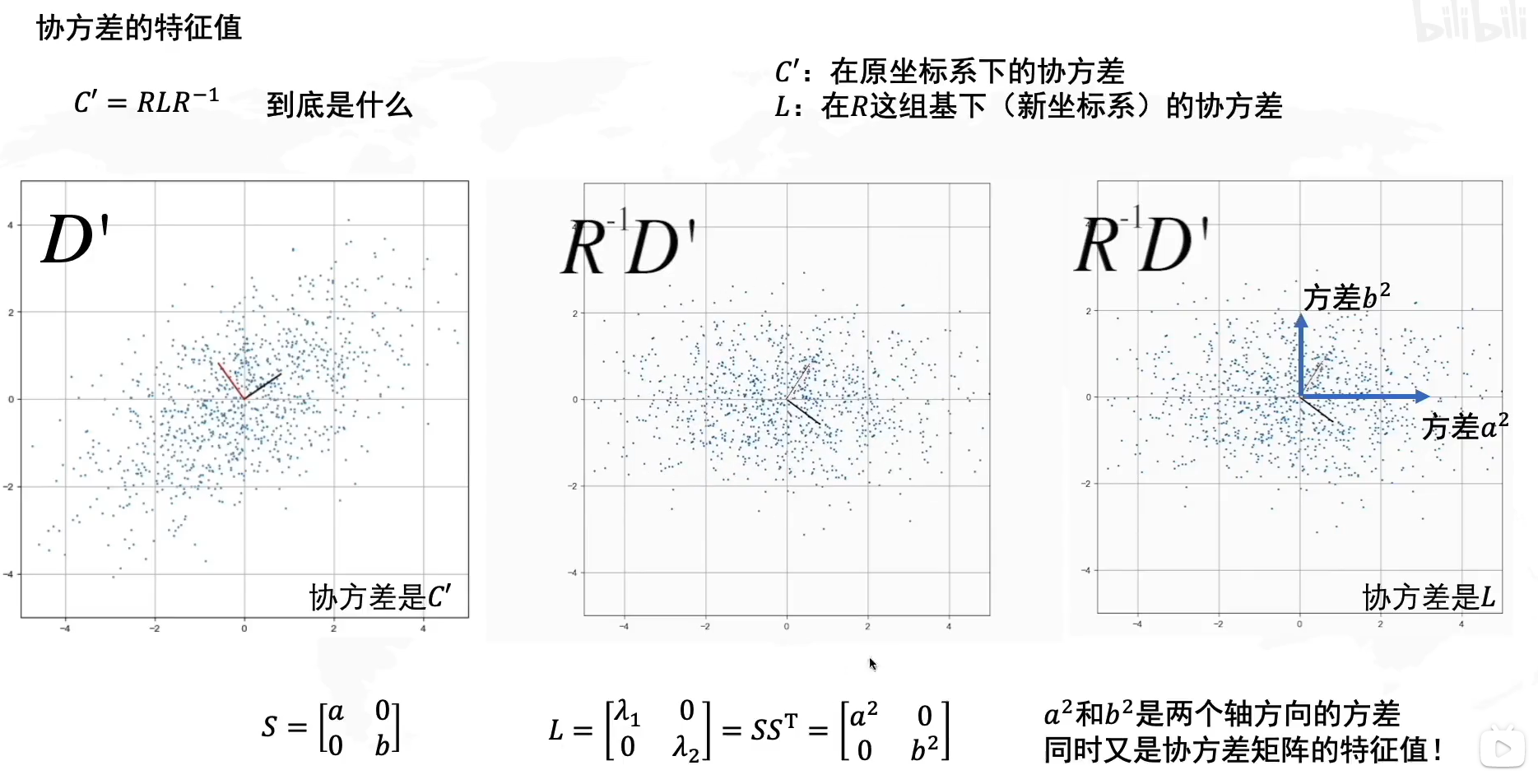
协方差的特征值:
评论区
这是挖掘数据线性分布规律的最重要算法。其实不仅仅用来降维,凡是涉及到分析数据分布特点的都可以用到。如:现在获得了某曲面大量的采样点云,要估计曲面在某采样点的法向量方向。则通过PCA分析该点及周围采样点的分布规律,找到数据点分布离散程度最大的两个正交方向,则这两个方向就近似构成曲面在该点的切平面,与此两方向正交的第三个方向就是曲面在该点的近似法矢
最初知道这个算法就是在研究点云处理、逆向工程时查文献了解的。后来开始转向机器学习又遇到这个。后面学了矩阵论加强了线代基础,把这个算法自己又推导了一遍,在看此视频之前已经从理论到直观透彻理解了
滤波
降采样
随机降采样,栅格降采样。
随机降采样
优点:速度非常快。
对于一些体量极大的点云很有效。比如一些工业大型构件(车体等)扫描出来的点云有可能达到上千万、上亿的点,直接去做处理是非常慢的,可以先做随机降采样处理到几千或者是几万的一个水平。
栅格降采样
栅格内选取一个点:
求平均或加权(慢一点但精准),随机(快但可能不精准)。
步骤如下图,注意:
体素降采样后,点云是有序的,就是栅格(体素)的顺序。
三维的坐标是(h_x,h_y,h_z),一维数组内的索引就是下图中的h。
排序的时间复杂是O(NlogN)(快排)。所以如果不做优化整体算法是O(NlogN)。
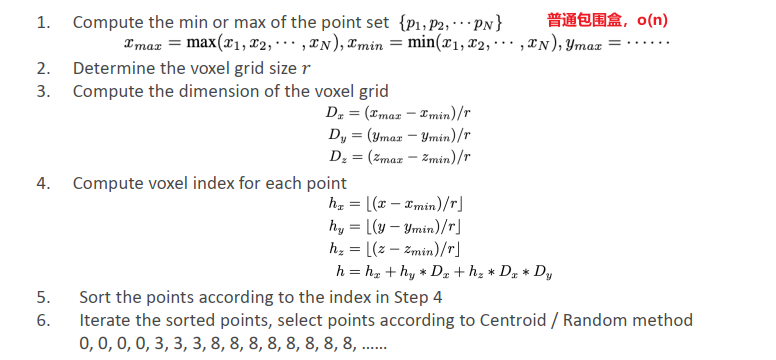
使用哈希表优化,能使用哈希表优化的主要原因是,我们知道最终这些点都会被放到h个容器中,每个点的ind正好代表了容器的编号,所以先把每个点放到对应的容器中,然后保留非空容器,最后在每一个容器内选择一个点。所以是使用空间节省时间。
最远点采样
先随机选一个点,然后遍历点云,选择一个最远点加入已选择点集S;
遍历点云,选择与S中所有点距离和最远的点加入S。重复这个过程。
由此优势:有些地方密度太大也只会选少部分点,得到的结果比较均衡,原始点云的分布特征也保留了下来。
但是复杂度比较高,至少是大于O(KN)的,应该是O(KlogKN)?(猜的,K是降采样后点数)

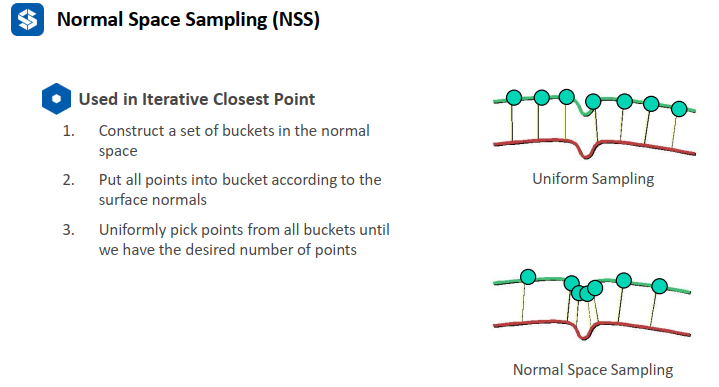
NSS法向量空间采样
思路就是对法向量建立区间(类似直方图),比如0-360分成36个区间,每个区间内采样固定数量的点。这样最终得到的点的法向量分布比较均衡,法向量可以理解为一种几何结构特征的描述,由此NSS后由于法向量分布比较均衡,所以原始点云的几何结构特征也得到了较好保留(不会直接把一些凸起直接滤掉什么的)。
上采样
双边滤波
先粘贴一点关于双边滤波在图像内做平滑的解释。
两个高斯权重相乘: $$ W S=e^{\left(-\frac{(i-k)^{2}+(j-l)^{2}}{2 \sigma_{s}^{2}}\right)} $$
$$ w r=e^{\left(-\frac{|f(i, j)-f(k, l)|^{2}}{2 \sigma_{r}^{2}}\right)} $$
上面是二维的高斯分布,跟位置有关系,下面这个是图像的亮度差值的一维高斯分布。
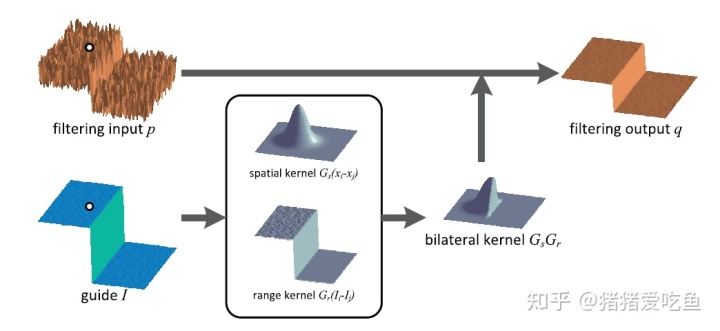
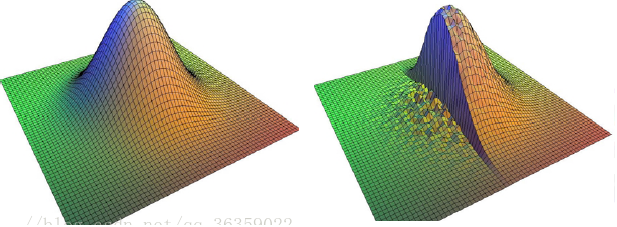
由于在空域,像素是整齐排列的,所以在函数上采样的ws(权重)是上图左侧均匀变化的,但是在color space亮度是没有规律的,所以就是越亮度或色彩越相似,权重越高;如果在边缘区域出现剧烈的亮度变化,那么不相似的一侧分配到的权重就会很小,于是出现上图所示的“断崖式”缩减。
opencv给出的实现中,给出的双边滤波器bilateralFilter的3个主要参数如下:
bilateralFilter(src, opt, d, sigmaColor, sigmaSpace);
/*
d 邻域半径
sigmaColor color空间的sigma值,也就是高斯分布的标准差值,值越大也就是亮度差值大的也会获得较高权重;接近无穷大时,那么退化成普通高斯滤波。
sigmaSpace 普通的空域高斯函数的标准差值。
*/
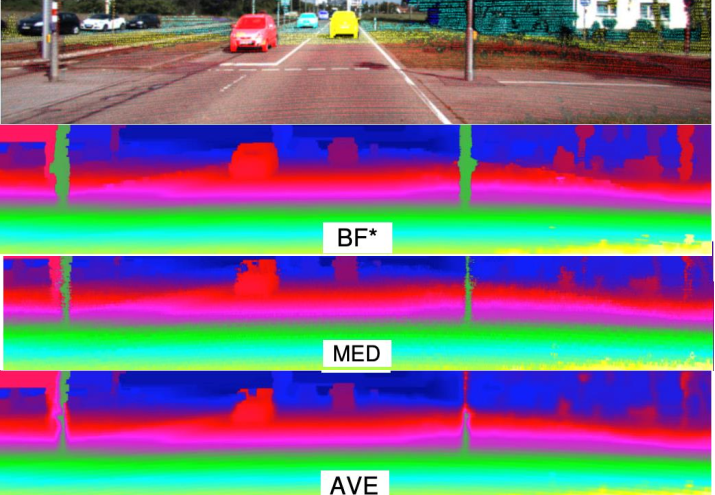
双边滤波做深度图点云补全
如下做传感器数据融合时,把稀疏的激光点云数据与图像融合,导致很多图像像素的位置没有深度信息,由此常规思路是高斯滤波用邻域深度数据得到当前像素的深度信息。
双边滤波的优化就是加入色彩信息的高斯函数,颜色相近,权值大,颜色不向近,权值小。(下图:双边,中值,均值)
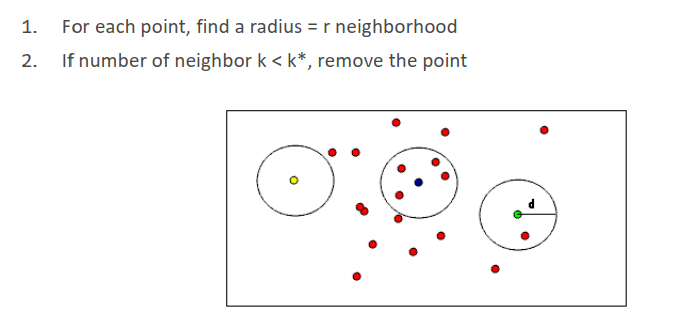
离群点去除
半径滤波
半径离群点去除,规定半径内的最少邻居数量
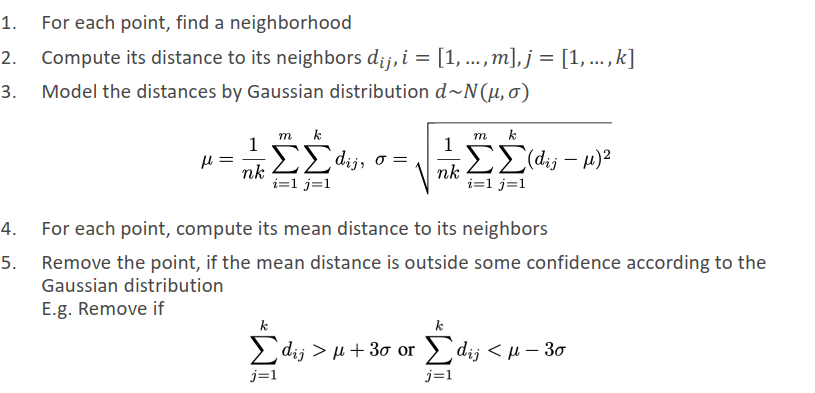
统计滤波
m个点,计算每个点邻域内k个点的距离,把所有距离当成是高斯分布计算其均值和标准差,然后通过控制sigma前的权重只保留邻域距离的均值在指定范围的点。
所以这个方法基本上可以不用调参(比如半径)就能取得比较好的结果。所以是根据整个分布的统计信息来进行滤波的。
open3d的接口,两个参数,基本可以不调。
print("Statistical oulier removal")
cl, ind = voxel_down_pcd.remove_statistical_outlier(nb_neighbors=20,
std_ratio=2.0)
display_inlier_outlier(voxel_down_pcd, ind)
近邻点查找
可用于法向量估计、离群点去除。knn-k近邻;radius nn-半径近邻
近邻点查找的核心思路,使用空间节约时间。由于raw点云数据是无序的,查找一个点的时间复杂度是o(n),n个点是o(n^2)。使用一些数据结构比如KD树或者八叉树存放数据使得点云数据变得有序。
knn查找一个点的的一个近邻点(1nn)的时间复杂度是o(logn)
KD树
k-dimentional tree
每个维度都执行一次二分,本质上还是一种二叉树。如下图,按照x、y的顺序分割,除非在某一方向上不用再分割则略过。(此时的leaf_size=1)

结构如下:(多了一些约束的二叉树)
axis:当前区域下一步要使用哪个轴分割
value:轴的位置
left,right:左右节点(分成了两个)
point_indices:包含有哪些点

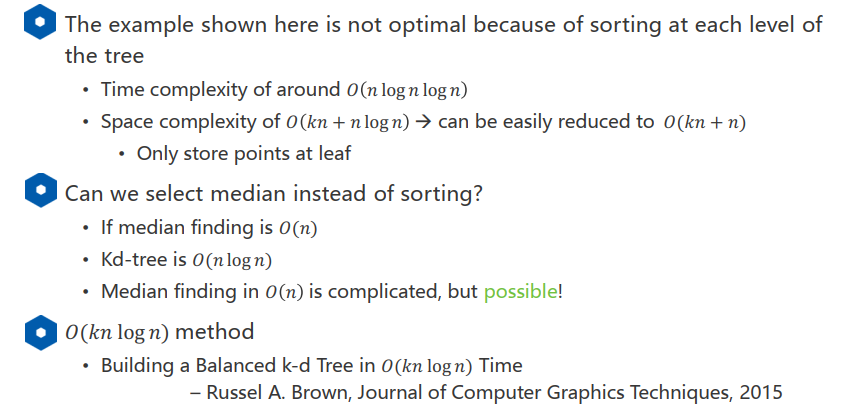
建立knn树的复杂度?
先看时间复杂度:由于需要每次用一个超平面把数据分成两半,所以需要分log(n)次,每次把数据分成两半时,需要把当前的维度排序(比如排序所有的x),快排需要nlogn,所以总体的时间复杂度为o(n logn logn)。有没有可能使用一种求中值的方法?因为目的只是分成两半。如果求中值是o(n),那么总体时间复杂度为o(nlogn)
查找knn
以图中自定义红点为例先说1nn,通过不断比较跟切平面的大小关系,最终定位到一个子节点g,从而确定了一个worst distance。由于这个圆与一些切平面相交了,所以需要继续考虑,先会返回s4到达s5右侧,e在最小范围内,ok,则更新worst distance,再继续运行知道满足条件。
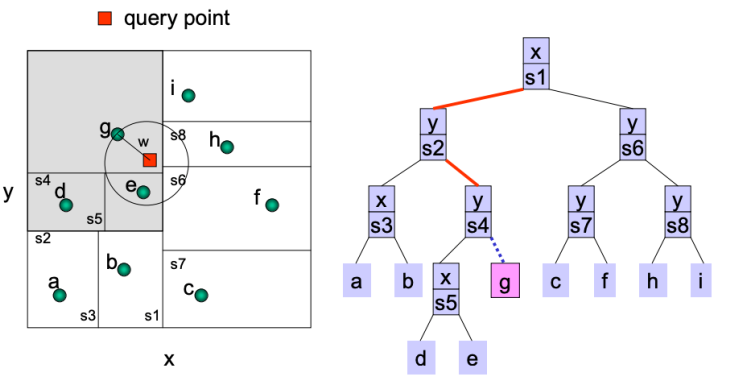
所以,理论上1nn的查找是大于o(logn)的(到达叶子节点后可能还要继续计算),但通常可以当成是o(logn)。如果是knn的的话那么复杂度就在o(logn)到o(n)之间了。
octree
八叉树。八叉树对空间进行均匀分割,KD树是在每个维度对点的分布进行均匀分割。
对比KD树的主要优势:
-
可以提前结束查找,如上图KD树的图,在到达g点时,根据最坏距离画一个圆,没办法知道这个圆是否与之前的分割平面相交(栈空间,只有当前层的参数),所以只有等DFS返回各个根节点的时候才能判断是否可以终止遍历。
-
八叉树可以提前终止,主要原因就是因为是均匀分割,所以可以计算出树上层的各个分割平面的位置,从而判断是否可以提前终止。
